Nome
Descrizione
Immagine
div()
Funzione che calcola la Divergenza di un campo vettoriale.
Sintassi: div(vet) dove "vet" è un vettore tridimensionale nelle variabili (x,y,z); es.
vet=[x^2+2y-z,2x-y^3+z,-x+2y-z^3]
Sintassi: div(vet) dove "vet" è un vettore tridimensionale nelle variabili (x,y,z); es.
vet=[x^2+2y-z,2x-y^3+z,-x+2y-z^3]
-
eat()
Programma che permette il calcolo dell'Esponenziale
di Matrice di una matrice quadrata. Sintassi eat(a) dove a è una
matrice quadrata
N.B. Richiede la presenza, nella directory "mate", della funzione invlapx
N.B. Richiede la presenza, nella directory "mate", della funzione invlapx
-
grad()
Funzione che calcola il Gradiente di un campo vettoriale
tridimensionale, nelle variabili (x,y,z).
Sintassi: grad(vet), dove "vet" è un vettore tridimensionale nelle variabili (x,y,z); es.
vet=[x^2+2y-z,2x-y^3+z,-x+2y-z^3]
Sintassi: grad(vet), dove "vet" è un vettore tridimensionale nelle variabili (x,y,z); es.
vet=[x^2+2y-z,2x-y^3+z,-x+2y-z^3]
-
rot()
Funzione che calcola il Rotore di un campo vettoriale
tridimensionale, nelle variabili (x,y,z).
Sintassi: rot(vet), dove "vet" è un vettore tridimensionale nelle variabili (x,y,z); es.
vet=[x^2+2y-z,2x-y^3+z,-x+2y-z^3]
Sintassi: rot(vet), dove "vet" è un vettore tridimensionale nelle variabili (x,y,z); es.
vet=[x^2+2y-z,2x-y^3+z,-x+2y-z^3]
-
laplacex()
Funzione che calcola la L-Trasformata di una funzione
nel dominio del tempo (t).
Sintassi: laplacex(f(t)), dove f(t) è una qualsiasi funzione L-Trasformabile
Sintassi: laplacex(f(t)), dove f(t) è una qualsiasi funzione L-Trasformabile
-
invlapx()
Funzione che calcola l'anti-trasformata di Laplace.
Sintassi: invlapx(G(s)), dove G(s) è una qualsiasi funzione nella variabile "s"
Sintassi: invlapx(G(s)), dove G(s) è una qualsiasi funzione nella variabile "s"
-
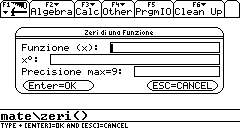
zeri()
Programma che calcola gli zeri di una funzione reale
di variabile reale, mediante il metodo di Newton.
Il punto "x0" è un punto di prima approssimazione di uno zero della funzione. Si consiglia di tracciare il grafico della funzione in esame, per valutare approssimativamente tale valore di x0.
Il punto "x0" è un punto di prima approssimazione di uno zero della funzione. Si consiglia di tracciare il grafico della funzione in esame, per valutare approssimativamente tale valore di x0.